- 유틸메뉴































| No. | 11 | Period | 2006.12.29 ~ 2011.10.28 |
|---|---|---|---|
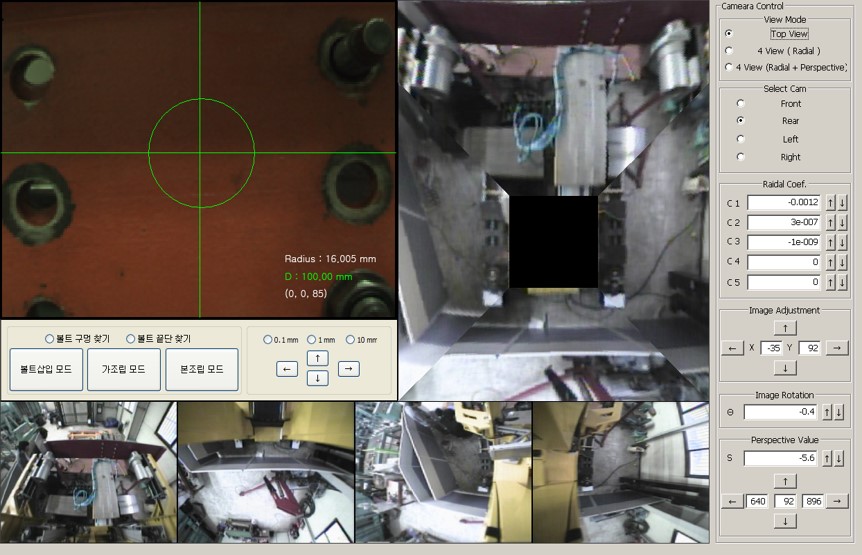
| Project | 로봇틱 크레인 기반 고층 건물 구조체 시공 자동화 시스템 개발 | ||
| Funded by | 한국건설교통기술평가원 | ||
|
- 목 표 : 본 연구는 첨단 로봇 기술과 초고층 건물 시공 기술을 융합하기 위하여, 아래와 같은 4가지 세부 과제를 수행함 - 사업총괄 및 핵심기술 적용성 연구 - 시스템 통합 및 인터페이스 연구 - 대상공사에 대한 분석 및 DFA(Design for Automation) 수립 - 고층 건물 구조체 자동화 시공 시스템 연구개발 현황 조사 및 성능평가 모듈 개발
< 제 2 세부과제 > - 고층건물 구조체의 시험시공 및 본시공 - 크라이밍 유압로봇 및 상하이동 구동 유닛 개발 - 건설공장 구조체 개발
- 수직/수평 철골구조 대응형 신뢰도 Stable 주행 Carrier 메커니즘 및 볼트 체결용 Mobile Manipulator 개발 - 고중량 지지 로봇의 핵심 구동부 개발 - 고출력 볼트체결 자동화 핵심 구동부 개발 - 양방향 시간지연 원격 시스템의 강인 제어 기술 “무선인식 및 다차원 CAD기반의 지능형 건설자재 조달시스템 개발”이며, 이를 통해 지능형 양중관리 시스템 및 실시간 진도관리 핵심 기술을 개발함 - 다차원 CAD 시스템과 무선인식 기술을 연동한 실시간 진도관리 시스템 개발 - 복합형 RFID 기술을 이용한 지능형 양중관리 시스템 개발 - RFID를 이용한 자재인식과 조작기술 개발 - 진도/자재/양중 통합관리를 위한 다차원 모니터링 시스템을 개발하고자 함
관련 동영상 : http://www.youtube.com/watch?v=l_olwAwGdKc 홈페이지 : http://www.robotcrane.re.kr |
|||